Embodied AI for the Physical World
We build agentic robots that perceive, reason, and act safely in unstructured environments.


Agentic System
Hierarchical, tool-using agents coordinating perception, planning, and control for long-horizon tasks.
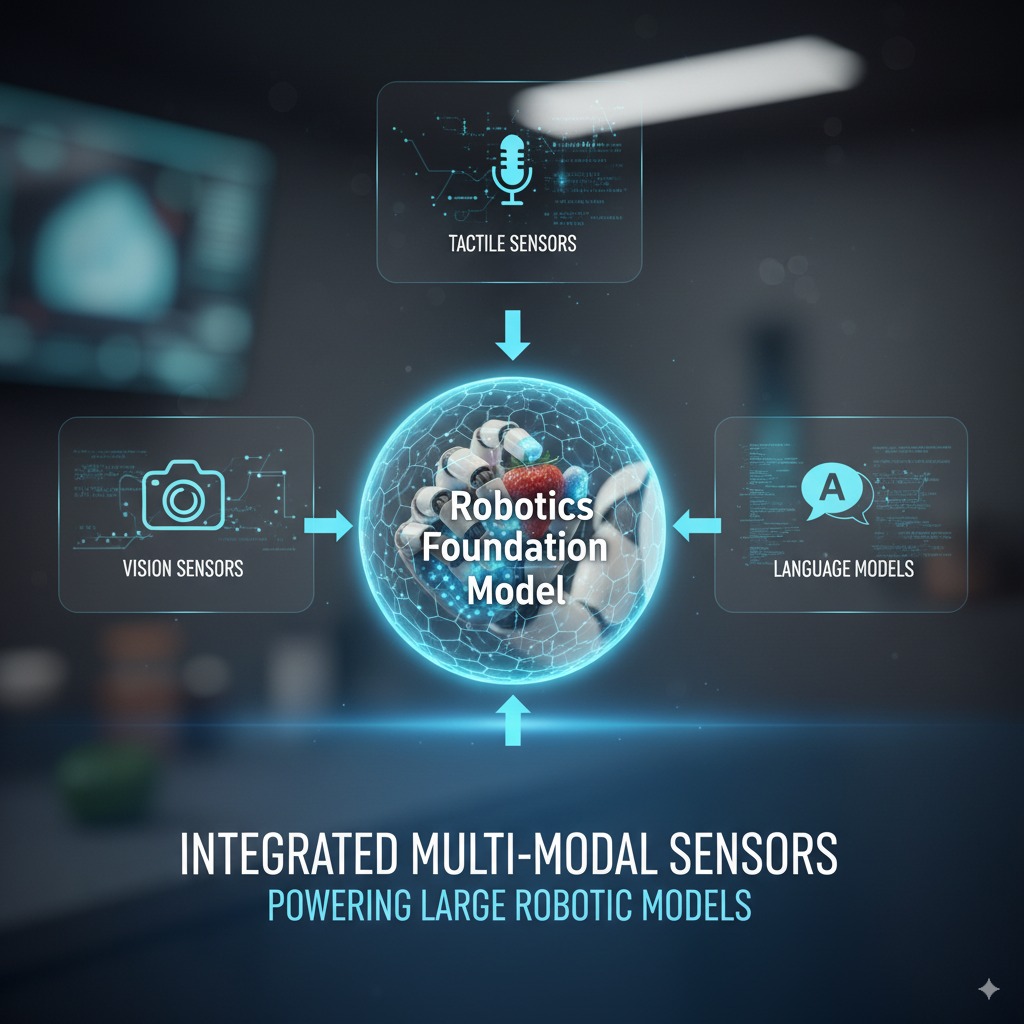
VLM / VLA
Leverage multimodal foundation models for perception, understanding, and decision‑making.
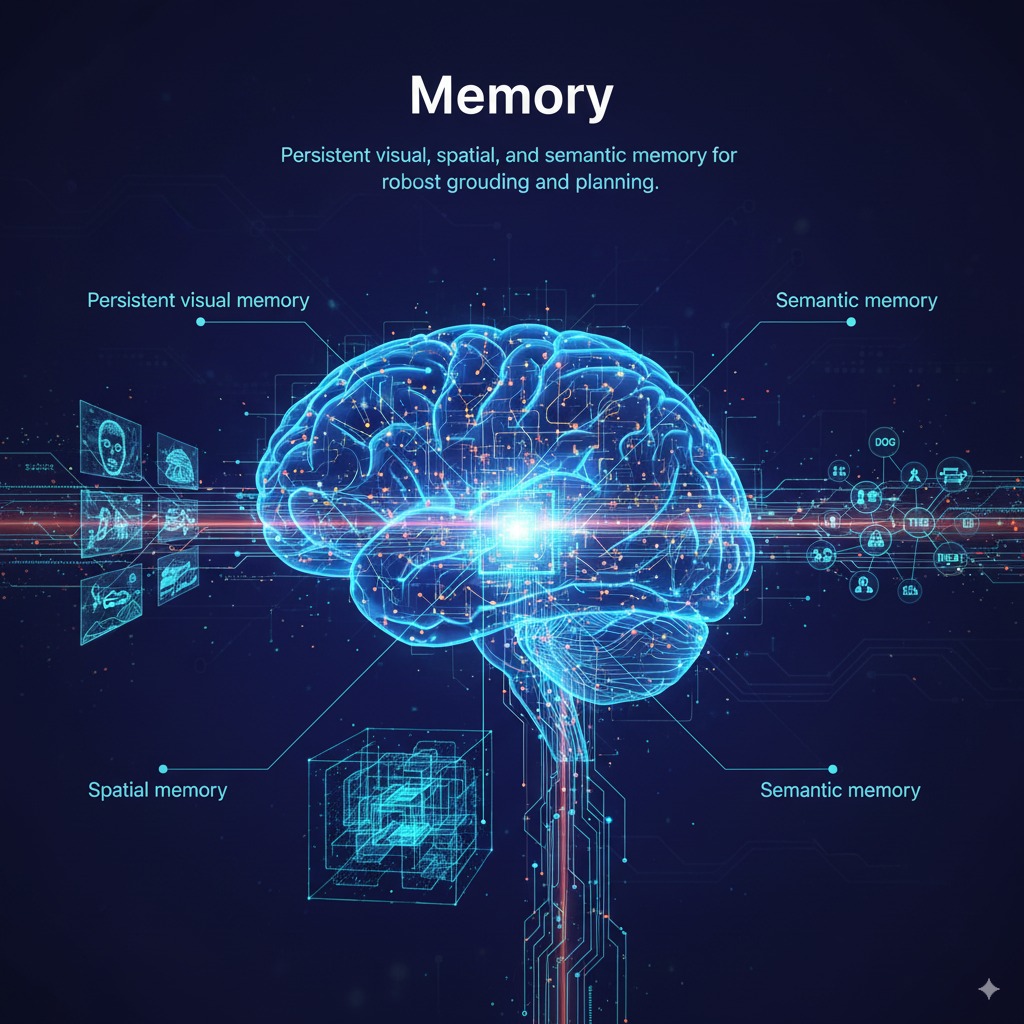
Memory
Persistent visual, spatial, and semantic memory for robust grounding and planning.
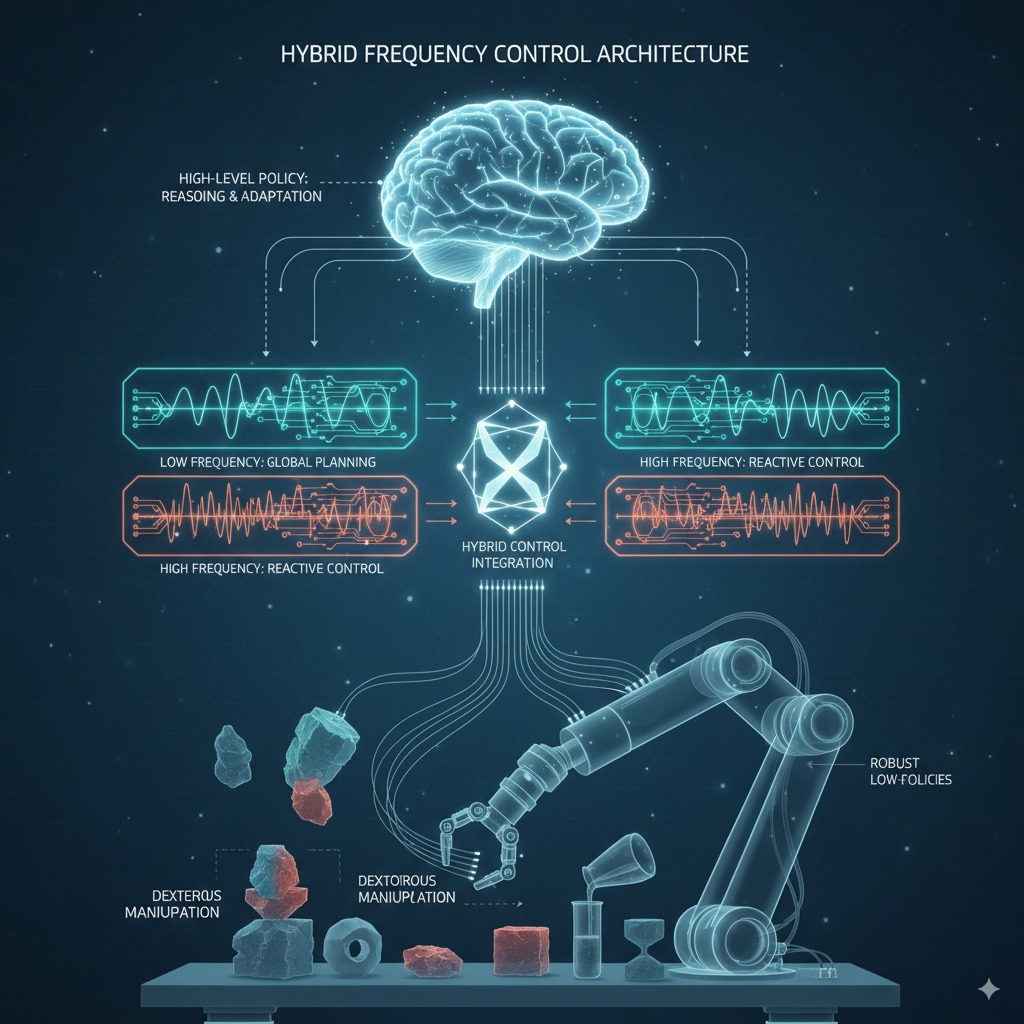
Control
Hybrid‑frequency control integrating global planning and reactive control.
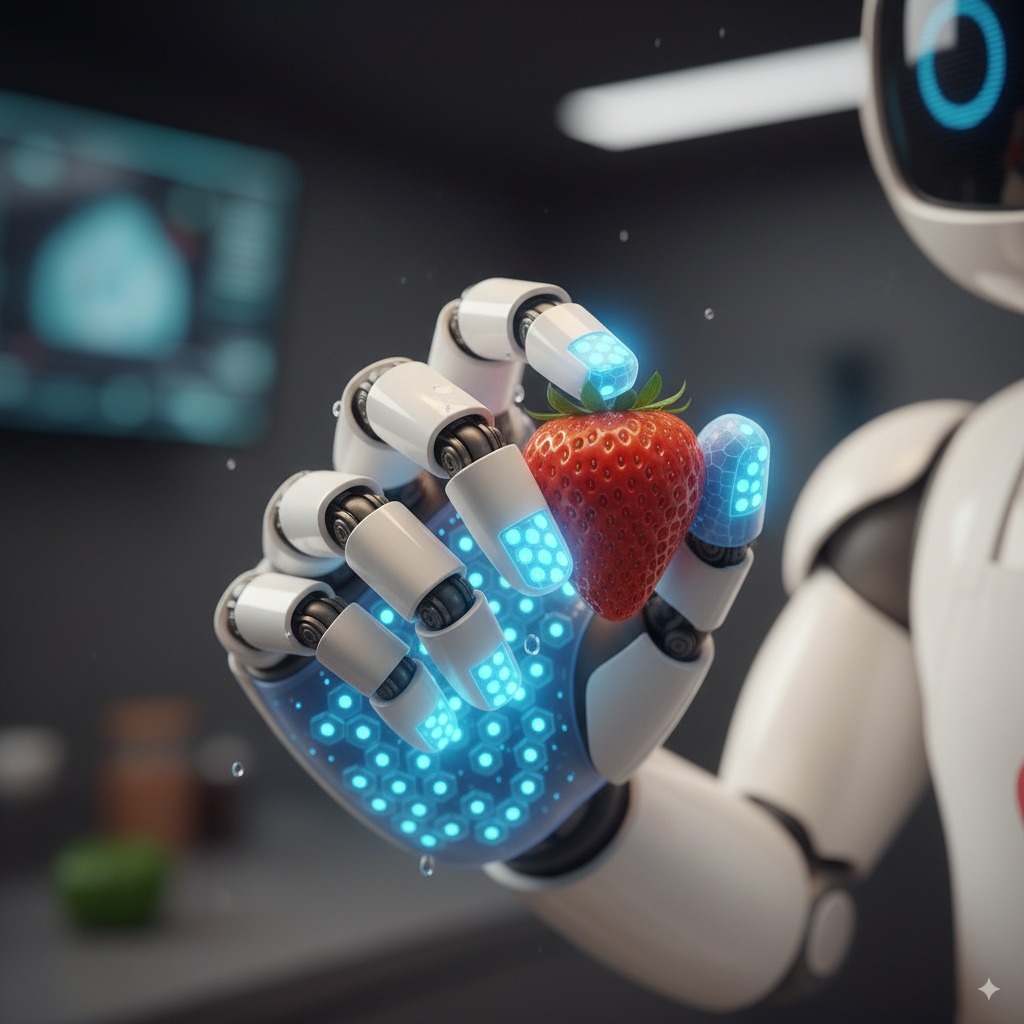
Tactile
High‑resolution tactile feedback enables delicate, reliable grasps.
We are hiring
Join us to push the frontier of embodied intelligence.
See open roles